揭秘VAE背后的数学原理
背景
主要内容
- 背景
- VAE在图像生成模型扮演了非常重要的角色
- ELBO应用: VQVAE, Diffusion Model, Dalle
- 数学门槛较高: 概率/泛函/微积分
- 生成模型之概率建模
- 生成模型在做什么/如何对概率密度建模/挑战
- VAE建模之数学基础
- 最大似然/蒙特卡洛/大数定律/维数灾难/积分变量替换/变分
- VAE
- 基于隐变量的生成模型/优化的困难
- 变分思想/下界的导出/如何求解
- VAE的代码实现
- 参考:
- Tutorial on Variational Autoencoders (NO_ITEM_DATA:doerschTutorialVariationalAutoencoders2021)
- Auto-Encoding Variational Bayes (NO_ITEM_DATA:kingmaAutoEncodingVariationalBayes2022a)
生成模型
机器学习的几个topic
- 监督学习:分类/回归
- 无监督学习: 概率密度估计
监督学习中的概率建模
- 基于特征来推断目标事件发生的概率 \(P(Y=1|X)=\sigma(f_{\theta}(X))\)
- ctr 里面: 基于用户和item的特征信息来推测用户点击item的概率
- NLP 中的相关性模型: 基于用户输入的query和doc特征来推测两者相关的概率
- 我们很少需要对样本特征的分布\(P(X)\) 直接建模
生成模型在做什么?
- 对样本\(X\) 的概率分布\(P(X)\) 做估计
- 知道什么样的样本出现的概率高,什么样的样本出现的概率低
- \(X\) 是什么?原始的特征输入。
- 文本:一句话
- ✅ X=I have a lovely dog.
- ❌ X=Lovely Dog have a i.
- 图像: 灰度的图的话,一个矩阵 \(X=\begin{pmatrix} 1 & 2 & 3 \\ 5 & 7 & 9 \\ 200 & 222 & 255 \\ \end{pmatrix}\)
- 文本:一句话
图像的例子
 ✅
✅ ❌
❌
用概率的语言描述这个世界
- 我看到的都是一些实实在在的东西,一个图像怎么用概率来描述?
- 可以认为
- 这个世界上的一切都是不确定的
- 发生的事实背后都有一个对应的概率分布
- 发生的事实其实都是上帝在基于这个分布采样的结果
- 比如:
- P(用户点击广告|用户, 广告)
- 基于用户和广告的特征,经过一个DNN输出了一个概率值P
- 然后基于二项分布采样得到了最后的事实
- P(用户点击广告|用户, 广告)
- 一张图像,我们可以认为是采样的结果
- 一张灰度图像可以看做是一个n*n维度的向量
- 整体是一个gauss分布
- 简单的可以认为是各向同性的,像素之间相互独立。
生成模型的目的
- 对图像的likelihood给出一个客观的判断
- 基于概率采样生成
- 我们可以生成更多的类似的,不在样本集合中的 X
- 例子:
- 给一些树木的样例图片,可以生成一片森林出来。
- conditional 的时候会产生更大的价值
- 控制的图像生成,P(x|c), 文本到图像的生成
例子1

例子2
概率密度建模
概率密度建模的难点在哪里?
建模密度函数\(P_{\theta}(x)\)
约束
- \(P_{\theta}(x)\ge 0, \forall x \in \mathcal{X}\)
- \(\int P_{\theta}(x) dx=1, \forall \theta \in \Theta\) ✅ 真正的难点
\(\nabla_{\theta} log P_{\theta}(x)\) 是否容易计算
- \(P(x)=\int P(x,z) dz\) ❌
能够容易sample 采样生成
- autogressive model 应用在图像像素级别 ❌
限定概率分布的形状,对pdf参数做函数化
- 假设这个分布是 \(\mathcal{N}(\mu_{\theta}(x),\Sigma_{\theta}(x))\)
- 极大似然估计来推断 \(\mu_{\theta}, \Sigma_{\theta}\)
- 这个方法在VAE中大量的出现,比如对\(Q_{\phi}(Z|X), P_{\theta}(Z|X)\)
限定序列结构做条件概率展开
- 依赖:
- \(X\) 是可以序列化的 \(X=(x_{1}, x_{2},\ldots, x_{n})\)
- \(P(x_{1}, x_{2},\ldots, x_{n})= P(x_{1})P(x_{2}|x_{1})\ldotsP(x_{n}|x_{1,\ldots,n-1})\)
- 对中间的每个条件概率项做好归一化即可
\(\int P(x_i|x_{1,\ldots,i-1}) dx_i=1\)
\(\int P(x_{1}, x_{2},\ldots, x_{n}) dx_1dx_2\cdots dx_n=1\)
在DNN中,表现为最后一层做softmax
比如dnn的language model 在训练的时候,为了输出token \(x_{i}\) 的概率,需要对所有的token做一个打分, 然后softmax
- autoregressive models
- 例子:
- language model
- image model: pixelRNN
- 效率的问题: 1920*1080=207,3600
- 如何序列化?
其他方法:
- 基于隐变量的生成模型
- VAE
- diffusion model
- GAN:其实绕开了对于概率密度的数学建模
- flow based
数学基础回顾
关于最大似然估计
什么是最大似然
- 数据集合 \(\mathcal{X}=\{X_1, X_2, \cdots, X_N}\}\)
- 建模 \(P_{\theta}(\mathcal{X})=\prod_{i}P(X_{i})\)
- 寻找参数\(\theta\),使得\(\mathcal{X}\) 发生的概率 \(P_{\theta}(\mathcal{X})\) 最大化
理解
- 事实为依据,存在即合理
- 用模型来解释已经发生的事实 \(P(\mathcal{X}|\theta)\)
- 哪个模型输出的概率高,就用哪个
- model1 预测 \(X\) 概率0.9
- model2 预测 \(X\) 概率0.2
- 而\(X\) 已经发生,选择和事实最接近的。
最大似然会有什么问题?
- 当数据量少的时候,会发生过拟合。
发生的事实可能有噪音, 你的结论可能是拟合了噪音。
类比地域歧视:
你雇过两个阿姨,打扫卫生都不干净,你发现他们都来自于A 省份,然后你得出一个结论:A省份的阿姨打扫卫生都很差,以后坚决不找A省份的阿姨。
不要因为一两次次失败就否定自己, 你的否定很可能是过拟合了。 :)
- 怎么办?
- 读万卷书,先验的知识来纠偏, 贝叶斯的方法 \(P(\theta|\mathcal{X})=\dfrac{P(\mathcal{X}|\theta)P(\theta)}{P(\mathcal{X})}\)
- 行万里路,看更多的数据,调整你的\(\theta\)
- 但是人生短暂,实践的代价可能会很大 :)
蒙特卡洛方法和维度灾难
什么是MC
The underlying concept is to use randomness to solve problems that might be deterministic in principle.
计算期望
\(E_{X\sim p(x)} f(X)\)
- i.i.d sample \(\{X_{i}\}_{i=1}^{n} \sim p(x)\)
- \(\dfrac{1}{n}\sum_{i=1}^{n}f(X_{i})\rightarrow \mathrm{E}(f(X))\)
背后的依据:大数定律
如果\(\{X_i\}_{i=1}^{n}\) 独立同分布,那么 \(\dfrac{1}{n}\sum_{i=1}^{n}X_{i}\rightarrow \mathrm{E}(X)\)
应用到上面:
如果\(\{X_i\}_{i=1}^{n}\) 独立同部分, 那么 \(\{f(X_i)\}_{i=1}^{n}\) 也是独立同分布的, 且\(\dfrac{1}{n}\sum_{i=1}^{n}f(X_{i})\rightarrow \mathrm{E}(f(X))\)
缺点:在高维空间中效率非常的低
- 在高维空间里面,你的采样到的大部分的点都不是你想要的
看一个面试题目:计算\(\pi\)
- 在二维空间的解法
- sample n个[-1,1] 之间的均匀随机变量
- 计算落入半径为1的圆形中间的比例
- \(\pi r^2/4r^{2}=\pi/4\)
- 推广到n维空间中
- \(n\) 维的球体的体积, 半径为\(R\)
- \(V_n=\dfrac{\pi^{\frac{n}{2}}R^{n}}{\Gamma(\frac{n}{2}+1)},~\Gamma(n+1)=n!\)
- 基于单位球体的体积公式反向推导 \(\begin{aligned}\pi &=(\dfrac{V_n\Gamma(\frac{n}{2}+1)}{R^n})^{\frac{2}{n}}\\ &=(\dfrac{V_n}{(2R)^{n}} \times 2^{n}\times \Gamma(\frac{n}{2}+1))^{\frac{2}{n}}\\ &=(\dfrac{V_{n}}{V_{cube}} \times 2^{n}\times \Gamma(\frac{n}{2}+1))^{\frac{2}{n}} \end{aligned}\)
- 方法:
- sample n个[-1,1] 之间的均匀随机变量
- 计算单位球中的个数比例得到 \(V_{n}/V_{cube}\)
- 维度灾难
- \(V_{n}\rightarrow 0, n\rightarrow \infty\)
- n维单位球体的体积趋向于0
- sample失效
- 在二维空间的解法
注:
- MC 偏好期望形式的优化目标 \(E_{P(X)} f(X)\)
- 例子:
- \(E_{\tau\sim p(\tau)}r(\tau)\)
- \(\int_{p(z|x)}p(x|z)dz\)
概率论基础的公式
链式法则
\(P(A_1 \cap A_2 \cap \ldots \cap A_n) = P(A_1) \times P(A_2 \mid A_1) \times \ldots P(A_n \mid A_1 \cap \ldots \cap A_{n-1})\)
- \(P(X_{1}X_{2}\ldots X_n) = P(X_1)P(X_2|X_1)\ldots P(X_{n}|X_{<n}})\)
贝叶斯公式
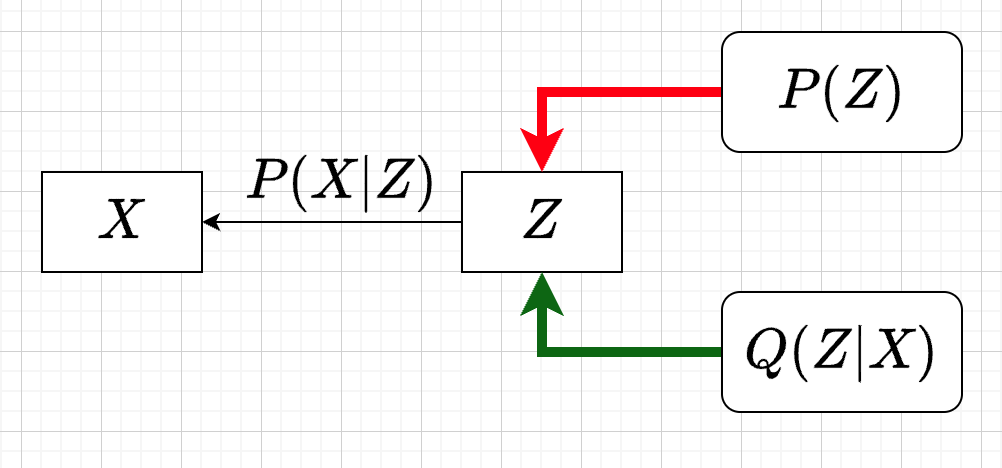
\(P(Z|X)=\dfrac{P(X|Z)P(Z)}{P(X)}\)
- \(P(Z)\) 先验
- \(P(X|Z)\) 似然性
- \(P(Z|X)\) 后验
- 在VAE中,\(Z\) 是隐变量,\(X\) 是图像
- 贝叶斯估计MAP,\(P(\theta|\mathcal{X}) = \dfrac{P(\mathcal{X}|\theta)P(\theta)}{P(\mathcal{X})}\)
高斯分布
定义
- \(X\sim \mathcal{N}(\mu,\Sigma)\)
- 一维:\(X\sim \mathcal{N}(\mu, \sigma^{2})\) , \(p(x)=\dfrac{1}{\sqrt{2\pi\sigma^{2}}}\mathrm{exp}({-\dfrac{1}{2}(\dfrac{x-\mu}{\sigma})^{2}})\)
- k维: \(p(x)=\dfrac{1}{\sqrt{(2\pi)^{k}|\Sigma|}}\mathrm{exp}(-\dfrac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu))\)
- mean vector: \(\mu=\mathrm{E}[X]\)
- covariance matrix:
- \(\Sigma_{i,j} = \mathrm{E}[(X_i-\mu_i)(X_{j}-\mu_j)}]\)
- 在VAE/diffusion model中,出现的都是对角矩阵 \(\Sigma=\sigma^{2}I\)
封闭性
- Affine transformation: if p(x) is Gaussian, then p(Ax + b) is a Gaussian.
- 高斯随机变量的线性组合还是高斯分布
- VDM: \(z_{t}=\sqrt{1-\beta_t}{z_{t-1}}+\beta_{t}\varepsilon\)
- Product: if p(x) and p(z) are Gaussian, then p(x)p(z) is proportional to a Gaussian
- 先验高斯,似然高斯,后验依然是高斯
- \(P(X|Z)=\dfrac{P(Z|X)P(X)}{P(Z)}\)
- VDM:\(P(z_{t-1})\) 高斯,\(P(z_t|z_{t-1})\) 高斯,那么\(P(z_{t-1}|z_{t})\) 也是高斯。
- Marginalization: if p(x, z) is Gaussian, then p(x) is Gaussian.
- Conditioning: if p(x, z) is Gaussian, then p(x | z) is Gaussian.
KL divergence
- 两个高斯分布之间的KL divergence \(\begin{aligned} &\mathcal{D}\left[ \mathcal{N}(\mu_0, \Sigma_0) \parallel \mathcal{N}(\mu_1, \Sigma_1) \right] \\ =& \frac{1}{2} \left( \text{tr} \left( \Sigma_1^{-1}\Sigma_0 \right) + (\mu_1 - \mu_0)^T \Sigma_1^{-1} (\mu_1 - \mu_0) - k + \log \left( \dfrac{\det\Sigma_1}{\det\Sigma_0} \right) \right) \\ \end{aligned}\)
- VAE中的涉及:后验和先验之间的距离 \(\begin{aligned} & \mathcal{D}\left[P(Z|X) \parallel P(Z)\right] \\ =&\mathcal{D}\left[ \mathcal{N}(\mu(X), \Sigma(X)) \parallel \mathcal{N}(0, I) \right] \\ =& \frac{1}{2} \left( \text{tr}(\Sigma(X)) + (\mu(X))^T (\mu(X)) - k - \log \det (\Sigma(X)) \right) \end{aligned}\)
重参数化
问题:
- 两种情形下求梯度
- \(\nabla_{\theta}\mathrm{E}_{p(z)} \left[ f_\theta(z) \right]\),pdf没有参数
- \(\nabla_{\theta}\mathrm{E}_{p_{\theta}(z)} \left[ f_\theta(z) \right]\),pdf有参数
- VAE: reconstruction error 的梯度计算
- \(\nabla_{\phi}E_{Q_{\phi}(Z|X)}\log P_{\theta}(X|Z)\)
pdf不含有参数
\[ \nabla_\theta \mathrm{E}_{p(z)} \left[ f_\theta(z) \right] = \nabla_\theta \int p(z)f_\theta(z)dz \] \[ = \int p(z) \nabla_\theta f_\theta(z) dz \] \[ = \mathrm{E}_{p(z)} \left[ \nabla_\theta f_\theta(z) \right] \] 求导穿过了期望,这个好处在于可以对最后这个式子做MC
pdf中含有参数
\[ \nabla_\theta \mathrm{E}_{p_\theta(z)} \left[ f_\theta(z) \right] = \nabla_\theta \int p_\theta(z)f_\theta(z)dz \] \[ = \int \nabla_\theta \left[ p_\theta(z)f_\theta(z) \right] dz \] \[ = \int f_\theta(z) \nabla_\theta p_\theta(z) dz + \int p_\theta(z) \nabla_\theta f_\theta(z) dz \] \[ = \int f_\theta(z) \nabla_\theta p_\theta(z) dz + \mathrm{E}_{p_\theta(z)} \left[ \nabla_\theta f_\theta(z) \right] \]
- 多出来一个左端项,不好处理
- 进一步,如果我们基于MC来表达期望的话
重参数化=积分的变量替换
什么是reparameterization trick?
- 如果 \(z\sim p_z, z = g(\varepsilon), \varepsilon \sim p_\varepsilon\)
- 那么 \(\mathrm{E}_{p_{z}}f(z)=\mathrm{E}_{p_\varepsilon}f(g(\varepsilon))\)
应用
如果期望依赖的pdf中有参数,而我们需要针对这个期望对参数求导 \(\begin{aligned} \nabla_\theta \mathrm{E}_{p_\theta(z)}[f(z)] &= \nabla_\theta \mathrm{E}_{p(\varepsilon)}[f(g_\theta(\varepsilon}))] \\ &= \mathrm{E}_{p(\varepsilon)}[\nabla_\theta f(g_\theta(\varepsilon}))] \\ &\approx \frac{1}{L} \sum_{l=1}^L \nabla_\theta f(g_\theta(\varepsilon^{(l)})) \end{aligned}\)
proof:
- 首先,两个pdf之间满足 \(p_\varepsilon=p_z(g(\varepsilon))g’(\varepsilon)\) \(\begin{aligned}P(\varepsilon < y) &= P(g^{-1}(z)<y) \\ &= P(z < g(y)) \\ & = \int_{-\infty}^{g(y)} p_z(s) ds \\ & \overset{s=g(\varepsilon)}{=} \int_{-\infty}^{y} p_z(g(\varepsilon))g’(\varepsilon) d\varepsilon \end{aligned}\)
- 其次 \(\begin{aligned} & \quad\mathrm{E}_{p_{z}}f(z)\\ =&\int f(s)p_z(s) ds \\ \overset{s=g(\varepsilon)}{=}&\int f(g(\varepsilon))p_z(g(\varepsilon))g’(\varepsilon) d\varepsilon \\ =&\int f(g(\varepsilon))p_{\varepsilon}(\varepsilon)d\varepsilon \\ =& \mathrm{E}_{p_\varepsilon}f(g(\varepsilon)) \\ \end{aligned}\)
类比log trick
可以类比于强化学习中的 policy gradient 求导 \(J(\theta)= E_{\tau\sim \pi_{\theta}(\tau)} r(\tau)\)
\(\begin{aligned} \nabla_{\theta}J(\theta) = & \nabla_{\theta} \int\pi_{\theta}(\tau)r(\tau)d\tau \\ = & \int \nabla_{\theta}\pi_{\theta}(\tau)r(\tau)d\tau \\ = & \int \pi_{\theta}(\tau) \nabla_{\theta}\log \pi_{\theta}(\tau)r(\tau)d\tau \\ = & E_{\tau \sim \pi_{\theta}(\tau)}\left[ \nabla_{\theta}\log \pi_{\theta}(\tau)r(\tau) \right] \end{aligned}\)
启发:
- 目标函数是一个期望的形式, 依赖的pdf中含有参数
- 两种处理的手段
- 重参数化
- log trick
Jensen’s inequality
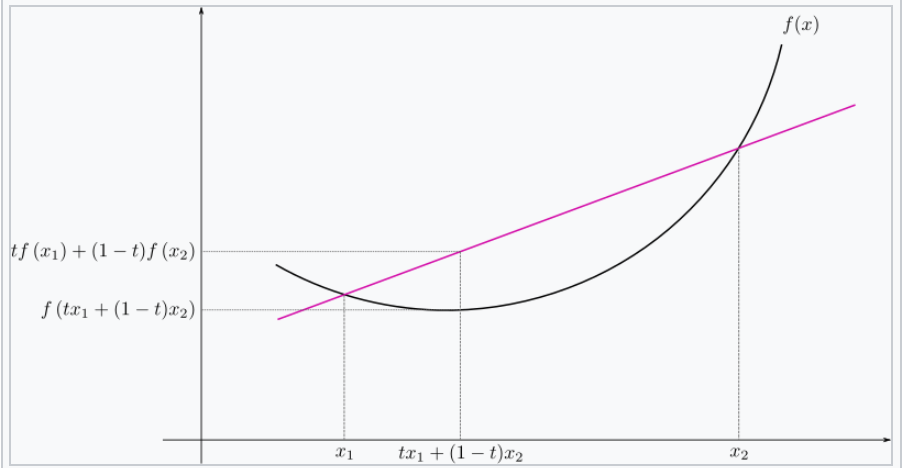
statement:
the secant line of a convex function lies above the graph of the function. \(f(tx_1+(1-t)x_{2}) \le tf(x_1)+(1-t)f(x_2), \forall t \in [0,1]\)
概率中的表述:
如果 \(X\) 是随机变量,\(f\) 是一个凸函数的话,\(f (E(X)) \le E(f(X))\)
注
- log函数是一个凹函数, \(\log (E(X)) \ge E(\log(X))\)
- 如果遇到 log和期望的时候,我们可以让log穿过期望符号,得到一个好的下界
- VAE: \(\log E_{Q(Z)} \dfrac{P(X,Z)}{Q(Z)} dZ \ge E_{Q(Z)}\log\dfrac{P(X,Z)}{Q(Z)}\)
变分
泛函 fuctional
- 泛函是一个函数:
- 输入是一个函数
- 输出一个值
- 例如熵的定义:\(H(p)=\int p(x) \log p(x)dx\)
- 变分:是在一个函数空间中针对一个泛函来寻求极值。
DNN 求解是在做泛函极小化的事情
给定数据集合 \(D=\{(x_i,y_i)|i=1,\ldots, N\}\)
loss:就是一个泛函
\(J(f) = \sum\limits_{(x_i,y_i)\in D} L(f(x_i), y_i)\)
在函数空间\(F\) 中做泛函的极小, F是连续函数的空间,无穷维。 \(\min\limits_{f\in F} J(f)\)
参数化: 泛函极小化到参数极小化
- 选定参数空间是DNN形式的函数
- \(f(x)=f_{n}\circ \ldots f_1(x)}\), \(f_{i}\) 是一层DNN变换,\(\theta\) 是全部的DNN参数
- \(f(x)=f_{\theta}(x)\)
- \(\min\limits_{\theta} J(\theta)\) 有限维空间中求解
变分的感觉
- 有一个泛函的存在,\(J(f)\)
- \(f\) 在一个函数空间中变化 \(\mathcal{F}\)
- 对 \(J\) 求极值
VAE中的变分
\(\begin{aligned} \log P(X) & = \log \int P(X,Z)dZ \\ & = \log \int \dfrac{P(X,Z)}{Q(Z)} Q(Z) dZ \\ &= \log E_{Q(Z)} \dfrac{P(X,Z)}{Q(Z)} \\ &\ge E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)} \end{aligned}\)
- 上面的式子对任意的概率分布\(Q(Z)\) 都成立
- 泛函 \(\mathcal{L}(Q) = E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)}\)
- 函数的空间是所有的PDF \(Q(Z)\)
- 下界极大化
这个不是在做变分
\(\begin{aligned} \log P(X) & = \log \int P(X,Z)dZ \\ & = log \int P(X|Z) P(Z) dZ \\ &= log E_{P(Z)} P(X|Z) \\ & \ge E_{P(Z)} \log P(X|Z) \end{aligned}\)
基于隐变量的生成模型
latent variables
什么是latent variables
- 我们看到的世界可能是高维空间到低维子空间的一个投影
- 我们观察获取到的信息\(X\) 本身是不完整的
- 或者说,我们无法观测到完整的信息,盲人摸象
- 例子:ctr预估,天气,人的心情,或者平台获取不到信息等
- 我们可以把观测之外的这些特征可以记作 latent variables
Plato’s Cave
In Plato’s allegory, a group of prisoners face the wall as a punishment and there are some physical objects behind them which the prisoners cannot see – the prisoners can only see the shadows of these objects on the wall. The shadows are otherwise the “observations” which the prisoners make – the observed variables. The physical objects are the “latent variables” the underlying variables governing the actual behaviour which we cannot directly see in Plato’s cave example.

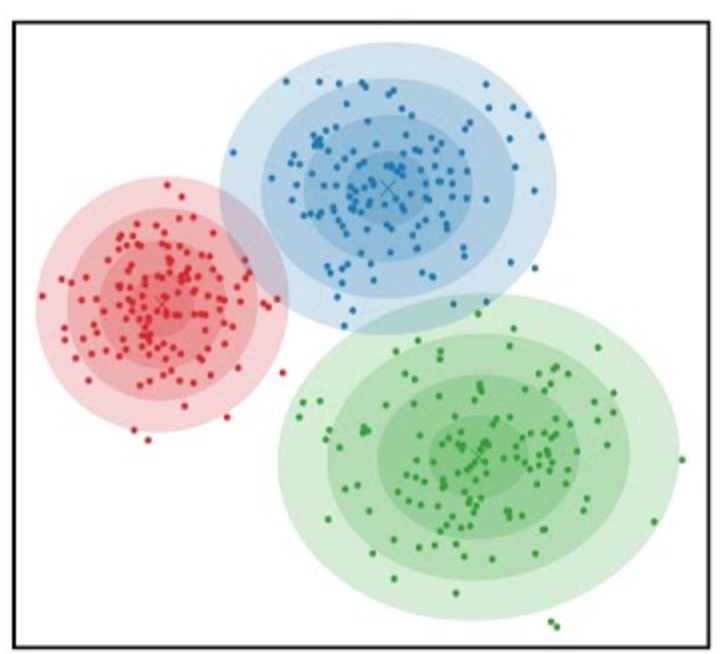
图片的latent variable
- 尽管说,一张图片包含了所有的信息,但是很多的信息是你的人脑反馈分析出来的。
- 比如这个图里面,你会反应出来它有簇,群的概念,这些就是\(Z\)
- 在人脸的图片中,\(Z\) 可能是肤色,脸型,发型,眼睛,鼻子的形状等
对的latent variables的一些假设
- 完整的样本是\((X, Z)\)
- 每个样本\(X\) 对应一个latent variable \(Z\)
- 但是我们只能观测到\(X\), \(Z\) 是观测不到的, 且一般没有一个明确的定义
- VAE中的\(Z\) 我们也不知道是feature,只是一种感觉
- 直接去优化 \(P_{\theta}(X)\) 是困难的, 有积分的存在
- \(P(X)=\int_Z P_{\theta}(X,Z)dZ=\int_{Z}P_{\theta}(X|Z)P_{\theta}(Z)dZ\)
- 但是知道了\(Z\) 后,\(P(X,Z)\) 或者 \(P(X|Z)\) 是容易优化的
基于隐变量的生成模型
- latent variable 变的至关重要
- \(Z\rightarrow X\)
- \(Z\) 表达了图像中至关重要的特征
- 知道了\(Z\), 整个图像就可以基于\(P(X|Z)\) decode 构建出来。
- 我们会把 \(Z\) 当做是 $X$对一个的encoding 向量。
- 生成:观测值是基于隐变量的值来生成的。
- 先sample \(Z\)
- 再基于 \(P(X|Z)\) sample得到 \(X\)
- \(P(X,Z)=P(Z)P(X|Z)\)
一个例子:高斯混合模型
\(P(X)=\sum_{Z}P(Z)P(X|Z)=\sum\limits_{k=1}^{K} \pi_{k}\mathcal{N}(x|\mu_{k},\Sigma_{k})\)
- sample过程
- 先根据先验\(P(Z)\) 决定在哪个群落点,
- 再根据局部的似然 \(P(X|Z)\) 采样,(根据这个群的均值,方差采样)
- 直接优化 \(\log P(X)\) 非常困难
- 但是 \(P(X,Z)=\prod\limits_{k=1}^K \pi_k^{Z_k}\mathcal{N}(X|\mu_{k}, \Sigma_{k})^{Z_k}\),
- 其中 \(Z=(Z_1, Z_2, \ldots, Z_{k})\) one-hot 形式
- \(\log P(X,Z)=\sum\limits_{k=1}^{K}Z_k[log\pi_k+\log\mathcal{N}(X|\mu_{k}, \Sigma_{k})]\) 容易优化
VAE 就是一个高斯混合模型
- 假设 \(Z \sim \mathcal{N}(0, I)\)
- 假设 \(P(X|Z) \sim \mathcal{N}(\mu(X), \Sigma(X))\)
- \(P(X)=\int P(X|Z)P(Z) dX\)
- 无穷个高斯的混合
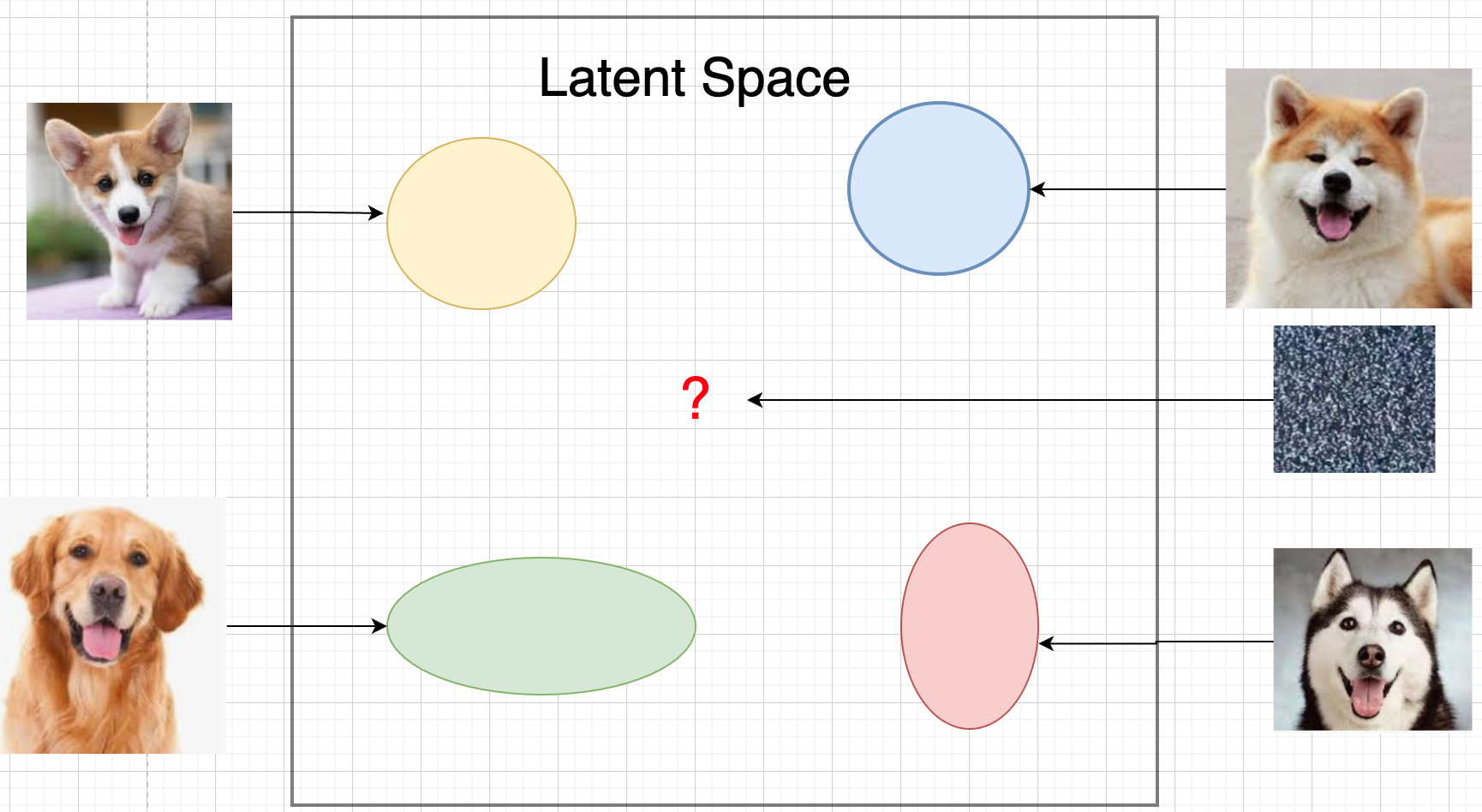
基于隐变量的图像生成模型
不是把所有的图像放在一起做一个分布 \(P(X)\)
- 这样的分布有了可能用处也不大,你在高维sample的时候困难极其的大
- 另外你对sample做不了太多的控制
每个图像可以看做对应一个分布
- 每个图像都可以看做是一个高斯分布下的采样
- 按照像素点的当前值,是一个高斯分布,有均值,方差
- 如果我们把方差relax以下,我们也可以基于每个图像得到一些新的图像
从一图一个分布到一个编码一个分布
- 一个图像一个分布有点太细了,没法泛化
- 对图像\(X\) 来做低维编码\(Z\) ,如果编码相同,那么对应的分布是\(P(X|Z)\) 是相同的。
- 这套编码至关重要,有了它,图像的基本特征就决定了,
- 人脸中,它可能包括了性别,肤色,发型,脸型等等
- 把这个编码空间学好了,你可以对生成的东西做更好的操控
- 如果把 \(P(X|Z)\) 学好了
- 那么我直接采样 \(Z\) 就好了,
- 这个分布需要很容易sample,首选的还是多维的gaussian 分布
隐变量生成模型的概率建模
一般的模型的概率建模方式
- 参数化单个样本\(X\) 的概率
- \(P_{\theta}(X)\)
- \(\log P_{\theta}(X)\) is easy
- 最大似然估计 \(\sum_{i} \log P_{\theta}(X_i)\)
生成式模型的概率建模方式
- 参数化单个样本
- \(P_{\theta}(X)=\int P_{\theta}(X|Z)P_{\theta}(Z)dZ\)
- VAE:
- \(P_{\theta}(X|Z)=\mathcal{N}(\mu(Z;\theta),\Sigma(Z;\theta))\)
- \(P_{\theta}(Z)=\mathcal{N}(0,I)\)
- \(\log P_{\theta}(X)=\log \int P_{\theta}(X|Z)P_{\theta}(Z)dZ\) ???
生成式模型的概率建模本质
- 无穷个高斯模型的混合
- 每个图像\(X\),都有一个对应\(Z\) 编码, 再对应一个该图像的分布
- sample:
- ancestral sample:\(Z\rightarrow X\)
- VDM \(Z_n\rightarrow Z_{n-1} \rightarrow Z_{n-2} \ldots \rightarrow X\)
隐变量生成模型的优化困难
优化的目标:
- \(P(X)=\int_Z P_{\theta}(X|Z)P(Z) dZ\)
- 积分的存在,导致 \(\log P(X)\) 无法直接优化
使用蒙特卡洛方法?
对于一个给定的样本 \(X\)
- 写成期望的形式 \(P(X)= E\limits_{Z\sim P(Z)} P_{\theta}(X|Z)\)
- MC
- sample \(Z_1, Z_2, \ldots, Z_n\) from \(P(Z)\)
- \(P(X) \approx \dfrac{1}{n} \sum_{i} P_{\theta}(X|Z_i)\)
- 再针对\(\theta\) 做梯度下降
困难
- 维度灾难的问题:高维空间中的sample 效率很低。
- \(Z_{i}\) 的有效性
- 直接来sample \(Z_{i} \sim P(Z)\),\(P(X|Z_i)\) 的概率大多为0,可能导致模型一直 error很大,很难拟合样本。
- 所以我们要更加有效的 Z, 最好使用 \(P(Z|X)\) 来sample \(Z\)
- 但是 \(P(Z|X)\) 是未知的,找 \(Q(Z|X)\) 来近似 $P(Z|X)
- 计算 \(E_{Z\sim Q} P(X|Z)\)
- \(\log P(X)\) 的问题
隐变量生成模型的另一个挑战
- 我们的初衷:\(Z\rightarrow X\)
- 先sample \(Z\sim P(Z)\)
- 再sample \(X\sim P(X|Z)\)
- \(Z\) 所在的 latent space 应该满足
- 连续性:\(Z\) 连续变化的时候,生成的图像也是在连续变化的。
- 完备性: 任意的一个sample \(Z\), 都可以被解码生成一个有意义的图像。
关于完备性:
本质是encoding部分\(Q(Z|X)\) 需要和你将来要sample的 \(P(Z)\) 之间是契合兼容的。
VAE
VAE 的思路
\(\log P(X)= \log \int P(X,Z) dZ\)
思考点一:log穿过积分
- 基于Jensen 不等式,\(\log\) 可以穿过去积分, 得到一个下界
- 积分项中加入分布Q(Z)
- 积分变成了期望,log穿过期望
- 而这个下界是容易优化的, 同时可以对下界优化不断提升
\(\begin{aligned} \log P(X) &= \log \int P(X, Z) dZ\\ &= \log \int P(X, Z) \dfrac{Q(Z)}{Q(Z)}dZ\\ &= \log E_{Q(Z)} \dfrac{P(X,Z)}{Q(Z)}\\ &\ge E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)}\\ \end{aligned}\)
思考点二:提升采样有效性
- 不从\(P(Z)\) 中sample \(Z\)
- 而从\(Q(Z)\) 中sample \(Z\),\(Q(Z)\rightarrow P(Z|X)\)
- 然后基于\(Z\) 重建 \(\widehat{X}=f_{\theta}(Z)\)
variational inference
对于任意的\(Q(Z)\), 有
- \(\log P(X) = \mathcal{L} (Q) + \mathcal{D}(Q(Z)\|P(Z|X))\)
- \(\mathcal{L}(Q) = E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)}\)
- \(\mathcal{D}(Q(Z)\|P(Z|X)) = E_{Q(Z)} \log\dfrac{Q(Z)}{P(Z|X)}\)
- \(\log P(X) \ge \mathcal{L} (Q)\) ,由于 KL 非负
- \(\mathcal{L}(Q)\) 是关于 \(Q(Z)\) 的一个泛函
- 参数化: \(Q_{\phi}(Z)\)
- \(\max\limits_{\phi}\mathcal{L}(Q)\) (变分的思想)
- \(\mathcal{L} (Q)\) 就是 ELBO
- 当\(Q(Z)=P(Z|X)\) 时,\(\log P(X) = \mathcal{L}(Q)\)
证明
\(\begin{aligned} \log P(X) &= E_{Q(Z)} \log P(X) \\ &=E_{Q(Z)} \log \dfrac{P(X,Z)}{P(Z|X)} \\ &=E_{Q(Z)} \log \dfrac{P(X,Z)}{P(Z|X)} \dfrac{Q(Z)}{Q(Z)} \\ & = E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)} + E_{Q(Z)} \log \dfrac{Q(Z)}{P(Z|X)}\\ & = E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)} + \mathcal{D}[Q(Z)||P(Z|X)] \end{aligned}\)
ELBO=重建误差+正则项
- \(\mathcal{L}(Q) = \mathrm{E}_{Q(Z)}[\log P(X|Z)] - \mathcal{D}[Q(Z) \| P(Z)]\)
- 一般的,我们会让 \(Q(Z)\) 直接依赖于\(X\), 变成\(Q(Z|X)\)
- \(\mathcal{L}(Q) = \mathrm{E}_{Q(Z|X)}[\log P(X|Z)] - \mathcal{D}[Q(Z|X) \| P(Z)]\)
理解
- 第一项: reconstruction error
- 对所有可能生成\(X\) 的\(Z\), 把似然性加权平均
- 有了encoding,decoding的意思
- Q(Z|X) 是对 X的一个编码
- P(X|Z) 是对 Z的一个解码
- 可以使用MC的方法来优化
- 第二项: 正则项
- 需要同时最小化 Q(Z|X) 和 P(Z) 之间的距离
- 一方面:对Q(Z|X) 做一个正则,防止 \(Q(Z|X)\) 变得过于尖锐,得到一个Dirac 分布
- 另一方面:我们需要学习到latent space和我们要采样的空间是契合的。
- 这两项之间需要有一个balance
这里我们并不希望第二项成为0,否则采样效率又降低回到从前(KL散度消失)
如果正则项成为0,这将意味着 Q(Z|X) 不含有关于X的任何信息,隐变量失去了 他的数据表征的能力。
proof
\(\begin{aligned} \mathcal{L}(Q) & = E_{Q(Z)}\log\dfrac{P(X,Z)}{Q(Z)}\\ & = E_{Q(Z)}\log\dfrac{P(X|Z)P(Z)}{Q(Z)}\\ & = E_{Q(Z)}\log P(X|Z) + E_{Q(Z)}\log\dfrac{P(Z)}{Q(Z)}\\ & = E_{Q(Z)}\log P(X|Z) - E_{Q(Z)}\log\dfrac{Q(Z)}{P(Z)}\\ \end{aligned}\)
参数化ELBO
给定一个\(X\), \(\mathcal{L} = \mathrm{E}_{Q(Z)}[\log P(X|Z)] - \mathcal{D}[Q(Z) \| P(Z)]\)
参数化
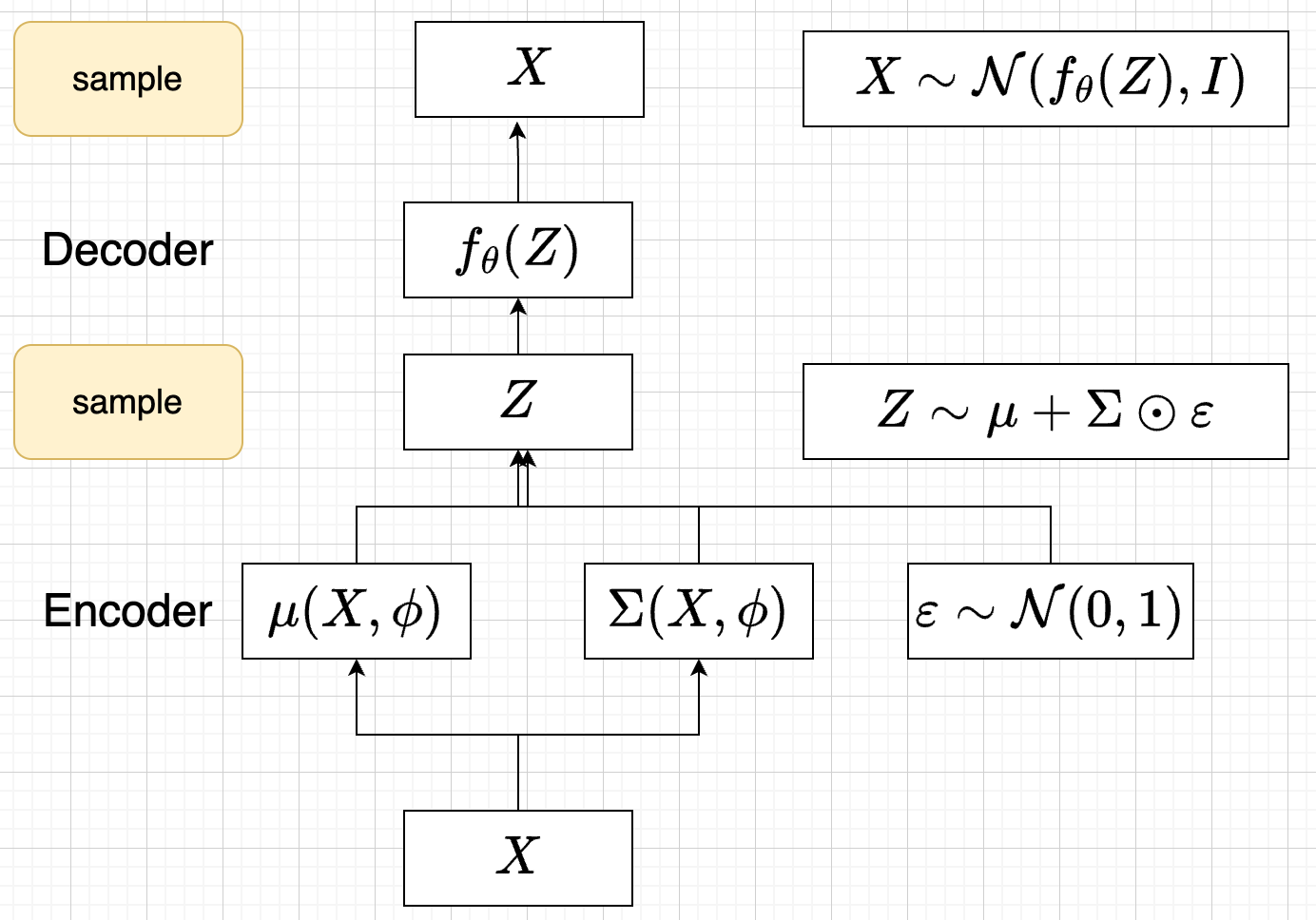
- \(Q(Z)\) 参数化为 \(Q_{\phi}(Z|X)=\mathcal{N}(Z|\mu_{\phi}(X), \Sigma_{\phi}(X))\)
- 每个样本对应一个z的独立的正态分布
- \(\mu_{\phi}(X)\),\(\Sigma_{\phi}(X)\) DNN
- \(P(X|Z)\) 参数化为 \(P_{\theta}(X|Z)=\mathcal{N}(X|f_{\theta}(Z), I)\)
- \(f_{\theta}(Z)\) DNN
- \(P(Z)=\mathcal{N}(0,1)\)
结果
\(\mathcal{L}(\phi,\theta)=\mathrm{E}_{Q_{\phi}(Z|X))}[\log P_{\theta}(X|Z)] - \mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\) 我们有两个参数\(\phi, \theta\), \(\phi\) 出现在变分的候选函数里面,\(\theta\) 出现在decoder里面。
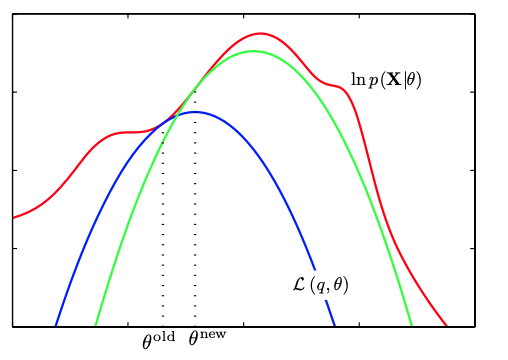
理解ELBO
- \(\log P_{\theta}(X) = \mathcal{L}(Q, \theta) + \mathcal{D}[Q(Z)\|P(Z|X)}]\)

- 对于任意的\(Q(Z)\),\(\log P_\theta(X)\ge \mathcal{L}(Q,\theta)\)
- 给定一个\(\theta\), \(\mathcal{L}(Q(Z), \theta)\) 是一个泛函
- 这也是变分的意义所在,在各种函数中寻找一个最好的。
- 给定一个\(Q(Z)\), \(\mathcal{L}(Q(Z), \theta)\) 提供了一个\(\theta\) 的函数曲线
- 不断地优化和提升下界 \(Q(Z)\),下界成为一个代理的优化目标
- 通过不多优化下界来更新\(\theta\)
VAE求解
\(\mathcal{L}(\phi,\theta)=\mathrm{E}_{Q_{\phi}(Z|X))}[\log P_{\theta}(X|Z)] - \mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\) 如何对\(\phi,\theta\) 求导?
- 对\(\theta\) 求导,easy
- 对\(\phi\) 求导?
对\(\phi\) 求导思路
- 第一项期望依赖的分布中有求导对应的参数, 需要重参数化
- 第二项可以显式计算,只和\(\phi\) 相关,容易计算梯度 \(\begin{aligned} &\mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\\ =& D\left[ \mathcal{N}(\mu_{\phi}(X), \Sigma_{\phi}(X)) \parallel \mathcal{N}(0, I) \right] \\ =& \frac{1}{2} \left( \text{tr}(\Sigma_{\phi}(X)) + (\mu_{\phi}(X))^T (\mu_{\phi}(X)) - k - \log \det (\Sigma_{\phi}(X)) \right) \end{aligned}\)
重参数化
\(\nabla_{\phi} E_{Q_{\phi}(Z|X)}\log P_{\theta}(X|Z)\) ,期望依赖的分布依赖于参数\(\phi\)
重参数化:对随机变量做变量替换
- before: \(Z\sim Q_{\phi}(Z|X)=\mathcal{N}(Z|\mu(X;\phi), \Sigma(X;\phi))\)
- after: \(Z=\mu(X,\phi)+\Sigma^{1/2}(X,\phi)*\varepsilon, \quad \varepsilon \sim N(0,1)\)
- \(E_{Q_{\phi}(Z|X)}\log P(X|Z)=E_{\varepsilon}\log P(X|\mu(X,\phi)+\Sigma^{1/2}(X,\phi)*\varepsilon))\)
最后期望的分布不再依赖于参数
求导此时可以穿过期望
\(\begin{aligned} & \nabla_{\phi} E_{Q_{\phi}(Z|X)}\log P_{\theta}(X|Z)\\ = &\nabla_{\phi} E_{\varepsilon}\log P_{\theta}(X|\mu(X,\phi)+\Sigma^{1/2}(X,\phi)*\varepsilon) \\ = &E_{\varepsilon} \nabla_{\phi} \log P_{\theta}(X|\mu(X,\phi)+\Sigma^{1/2}(X,\phi)*\varepsilon) \end{aligned}\)
最终的求解算法
最后的优化目标
\(\begin{aligned} \mathcal{L} &= \mathrm{E}_{Q_{\phi}(Z|X))}[\log P_{\theta}(X|Z)] - \mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\\ &=\mathrm{E}_{\varepsilon}[\log P_{\theta}(X|Z(\phi,\varepsilon))] - \mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\\ \end{aligned}\)
应用MC方法
- sample \(\varepsilon_l \sim N(0,1), Z_l=\mu(X,\phi)+\Sigma^{1/2}(X,\phi)*\varepsilon_{l}\)
- 计算ELBO \(\mathcal{L}(\theta, \phi, X)=\dfrac{1}{L}\sum\limits_{l=1}^{L} \log P_{\theta}(X| Z_{l})} -\mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\)
- 对\(\phi, \theta\) 求导
前向的步骤
VAE训练好后怎么用?
直接生成
这个时候可以抛弃encoder \(Q(Z|X)\) 了
- sample \(Z\) from \(P(Z)\)
- 确定性函数做一个映射 \(f(Z)\)
why?
因为在优化的过程中 \(Q(Z|X)\) 和 \(P(Z)\) 已经比较靠近,作为优化的第二项
重构原来的图像
encoder 和decoder 都需要使用
- 基于\(Q(Z|X)\) 得到encoding \(Z\)
- 基于\(P(X|Z)\) 生成出来 \(\hat{X}\)
理论的依据
高斯分布+CDF逆变换可以拟合任意的分布
- 假设
- 随机变量 \(N\sim \mathcal{N}[0,1]\), 对应的CDF 是\(\Psi\)
- 那么\(Y=\Psi(N)\sim \text{Uniform}[0,1]\)
- 目标随机变量\(X\) 对应的分布的CDF是 \(F\)
- 那么随机变量 \(X=F^{-1}(Y)\) 分布满足\(F\)
均匀分布+CDF逆变换可以拟合任意的分布
假设
- 随机变量 \(U\sim \text{Uniform}[0,1]\)
- 目标随机变量对应的CDF是 \(F(x)=P(X\le x)\)
结论:随机变量 \(X=F^{-1}(U)\) 分布满足\(F\)
证明:
\(P(X\le x)=P(F^{-1}(U)\le x)=P(U\le F(x))=F(x)\)
高斯分布到均匀分布
- 假设
- 随机变量 \(N\sim \mathcal{N}[0,1]\), 对应的CDF 是\(\Psi\)
- 那么\(Y=\Psi(N)\sim \text{Uniform}[0,1]\)
- 证明: \(P(Y\le y)=P(\Psi(N)\le y )=P(N\le \Psi^{-1}(y))=\Psi(\Psi^{-1}(y))=y\)
- 假设
本质:
如果能在source, target随机变量之间建立一个单调的一一映射的关系,就可以得到target 随机变量的模拟。
在生成式模型中运用:
sample \(X\) 可以分两步走
- 先sample \(Z\sim \mathcal{N}(0,1)\)
- 然后再基于一个复杂的确定函数变换(交给DNN学习)得到 \(f(Z)\) 变换得到\(X\)
- 随机变量 \(X=f(Z)\) 就是对整体的sample建模
为什么不用均匀分布做先验?而使用高斯?
- 高斯分布在整个空间上有定义,计算KL 不会有除以0的问题发生
- 高斯分布有很多很好的性质可以使用
一些思考
我们的假设:
- 可以基于隐变量来做sample
- 先sample \(Z\), 然后基于 \(P(X|Z)\) 再sample 出来 \(X\)
- 各种高斯:
- \(P(Z)\) gaussian,\(P(Z|X)\) ,\(P(X|Z)\) 都是gaussian, \(P(X,Z)\) 是gaussian
本质的建模:无穷个高斯模型做加权混合
- \(P(X) = \int P(X|Z)P(Z) dZ \approx \sum_{i} P(X|Z_i) P(Z_{i}) \delta Z\)
- 整体看:图像的概率分布是无穷多个高斯分布来做加权的组合
- 且权重的分布是符合高斯分布
- 微观的看:一个图像只对应于一个高斯分布 \(\mathcal{N}(\mu(Z), \Sigma(Z))\)
- 从生成的角度看,\(Z\) 决定和生成了\(X\)
VAE 的生成的图像模糊
- 最后的重建误差是所有像素点上的各个误差平均的结果
- 重建误差和正则项之间的balance
- 重建误差控制了图像的质量
- 正则项让我们向latent space的完备性上倾斜
关于噪音
- 训练的过程中出现了一次\(Z\) 的sample
- \(X\) 是基于一个不确定的,有噪音的东西生成的。
- 监督学习中也会有加入噪音的方式来训练模型,提升模型的鲁棒性,抗过拟合。
open problems
为什么不考虑协方差?如何建模像素之间的依赖呢?
- 图像中最重要的一个特征是相互之间的像素的依赖性
- 而我们的给出的假设中,\(P(Z), P(X|Z), P(Z|X)\) 统统都去掉了协方差。
\(P(Z)\) 可以sample空间这么大,如何保证 \(P(X|Z)\) 生成出来的也是个正常的人脸?
- 我们能把latent space 充分的学习到吗?保证它的完备性?
VAE代码实现
代码实现
model
| |
loss
| |
train
| |
总结
生成模型
- 概率建模 \(P(X)\)
- 目的是为了采样,生成样本以外的x
- 计算似然性
- 如果直接基于autoregressive model,decode代价太大
- 基于隐变量的方式: \(Z\rightarrow X\)
求解:
- 每个X的背后都有一个Z,但是Z未知,所以需要遍历Z
\(P(X)=\int P(Z)P(X|Z) dZ\)
- log 很难处理
- 很难采样到对X有实质贡献的Z
- Jensen 不等式得到了似然函数的变分下界
- 最大似然转化为了对下界的优化上
- \(\log P(X) \ge \mathcal{L} (Q)\)
- \(\mathcal{L}(Q) = E_{Q(Z)} \log \dfrac{P(X,Z)}{Q(Z)}\)
- 优化下界: \(\mathcal{L}(\phi,\theta)=\mathrm{E}_{Q_{\phi}(Z|X))}[\log P_{\theta}(X|Z)] - \mathcal{D}[Q_{\phi}(Z|X) \|P(Z)]\)
- 下界中有两套参数 \(\phi, \theta\)
- 变分相关的参数 \(\phi\), encoder, 不断地提升下界
- 似然函数中的\(\theta\), decoder
使用:
- 使用的时候我们会丢掉 Encoder, 使用Decoder
优化中的独特点:
- 对下界来优化
- 有两套参数:一个是优化提升下界的,一个是正常的参数
建模的本质:无穷个高斯和一个高斯
对于一个图像\(X\)
- 如果Z不知道的情况下,X是无穷个高斯分布的组合 \(P(X)=\int P(Z)P(X|Z) dZ\)
- 当Z知道的情况下,X只对应唯一一个高斯分布\(\mathcal{N}(\mu(Z), \Sigma(Z))\)